Złożenia mechaniczne i analiza kinematyczna w BricsCAD
Tworząc złożone mechanizmy w oprogramowaniu CAD zmuszeni jesteśmy pracować na wielu komponentach, które finalnie mają być połączone w spójną całość. Projektowanie w dwóch wymiarach ogranicza nasze możliwości oceny kinematyki złożenia. Dopiero praca w trzech wymiarach i tworzenie geometrycznych wiązań między elementami pozwoli na wykrywanie potencjalnych błędów na etapie projektowania, pozwalając zaoszczędzić czas i pieniądze przeznaczone na wczesne prototypowanie.
Zastosowanie prostych i intuicyjnych mechanizmów wspomagających pracę konstruktora, posiadających jednak duże możliwości tworzenia złożeń, poważnie ograniczają lub nawet całkiem eliminują ryzyko powstawania błędów od samego początku pracy.
W BricsCAD pracę ze złożeniami można rozpocząć od czystego szablonu i dodawać do niego kolejne komponenty, definiując relacje geometryczne pomiędzy poszczególnymi składnikami. Jeśli są to wcześniej wykonane detale sprawa jest prosta i tak też w większości sytuacji wygląda standardowo praca. W sytuacji, gdy umieszczany element został zamodelowany w innym systemie, a dostępny jest jedynie w formacie uniwersalnym (ACIS), to również może być wykorzystany do budowy produktu. Oczywiście, jako że tworzenie struktury polega na budowaniu powiązań pomiędzy poszczególnymi składnikami, taki zaimportowany obiekt musi zostać odpowiednio przetworzony. W tym celu można wczytaną bryłę przerobić tak, aby każdy z występujących elementów jego struktury zapisać jako oddzielny plik komponentu. Wykonuje się to przez polecenie Mechanical -> Form Component lub przez odpowiednią ikonę na pasku Mechanical. Po zaznaczeniu odpowiedniego fragmentu konstrukcji i wybraniu tego polecenia możliwe będzie zapisanie go jako oddzielnego obiektu konstrukcyjnego. Podejście takie umożliwia odtworzenie powiązanej relacjami struktury w celu poprawnego zbudowania konstrukcji. Mając już zapisane składniki można przystąpić do definiowana relacji, co będzie omówione w dalszej części artykułu.
Chcąc utworzyć złożenie należy rozpocząć od czystego szablonu. Można w tym celu posłużyć się szablonem Default3D-metric.dwt i zacząć pracę w widoku perspektywy siatki podstawy. Aby ułatwić i przyspieszyć pracę podczas składania konstrukcji, warto wyświetlić pasek narzędzi 3D Constraints oraz Mechanical. Oczywiście, polecenia te są dostępne również w menu Parametric -> 3D Constraints oraz w menu Mechanical.
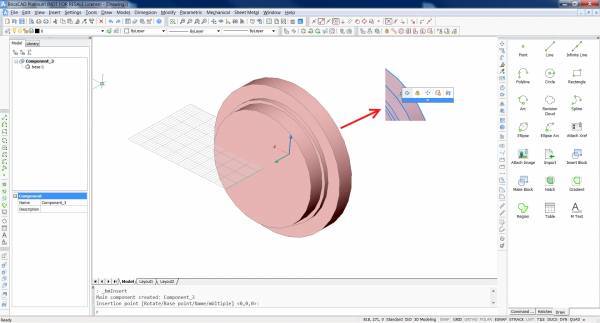
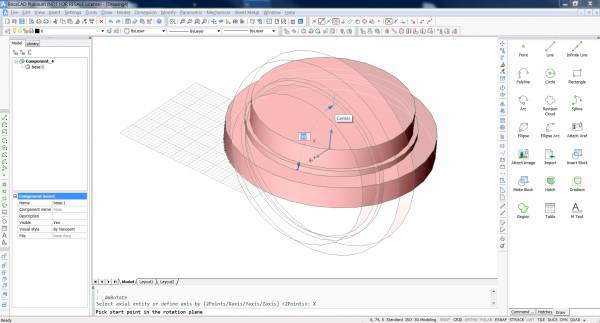
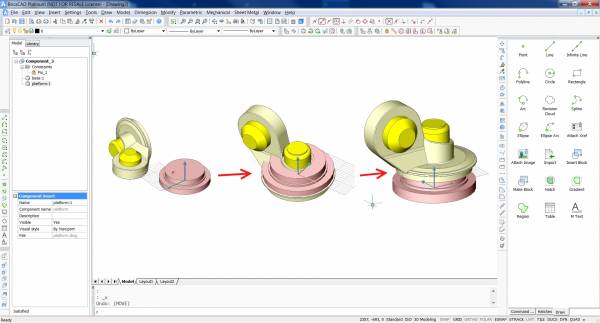
Wstawiając pierwszy element (w tym przykładzie będzie to base.dwg) przez wstawienie komponentu (Insert Component) otrzymujemy detal, który należy ustawić. W menu BricsCAD jest możliwość podania punktu wstawienia, czy wykonania obrotu. Można go wstawić w dowolnej orientacji, a obrót wykonać później (Rys. 1), wystarczy więc potwierdzenie klawiszem enter proponowanych współrzędnych wstawienia obiektu. Gdy jest on już umieszczony w obszarze złożenia, można zmienić jego orientację przez wykonanie obrotu. Wystarczy najechać kursorem na ściankę, a automatycznie przez system podpowiadana jest akcja obrotu. Po jej wybraniu możliwe jest skorygowanie położenia wstawionej geometrii przez obrót wokół jednej z osi. Wystarczy wybrać z dostępnego menu oś (w tym przypadku X) oraz wykonać obrót o żądaną wartość (Rys. 2).
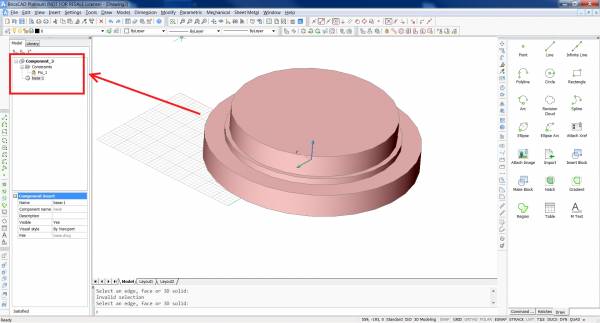
Aby możliwe było dodawanie kolejnych składników konstrukcji wraz z definicją powiązań geometrycznych pomiędzy nimi, trzeba dokonać utwierdzenia podstawy konstrukcji. Dokonuje się tego w prosty sposób, podobnie jak obrót – przez najechanie kursorem na dowolną krawędź, a następnie na ikonę obrotu i odczekanie aż rozwinie się menu kontekstowe. Jako druga od lewej znajduje się ikona utwierdzenia geometrii (Add fixation). Polecenie to jest również dostępne w menu lub pasku narzędzi więzów 3D. Po wykonaniu tej czynności na drzewie modelu w grupie utwierdzeń (Constraints) pojawiła się ikona symbolizująca nadanie tej relacji (Rys. 3).
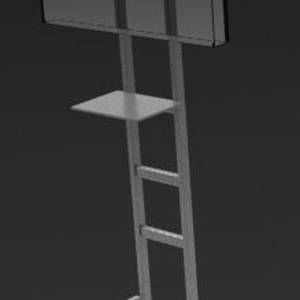
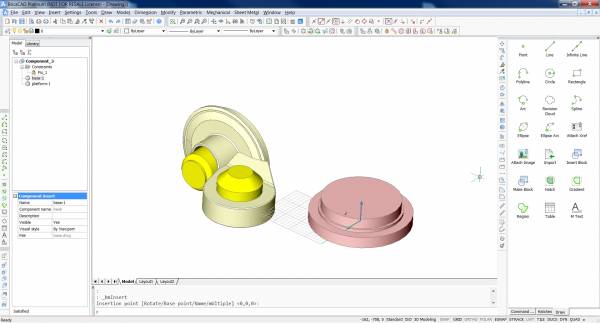
Mając już przyblokowaną podstawę można wstawić drugi składnik konstrukcji. Będzie to platform.dwg. Podczas umieszczania pojawią się takie same możliwości modyfikacji jak poprzednio. Najlepiej w tej sytuacji umieścić ten komponent tak, aby łatwo można było wskazać powierzchnie, które będą wykorzystywane przy definiowaniu relacji geometrycznych (czyli inaczej mówiąc więzów) pomiędzy obiektami. Przykładem może być ustawienie jak na rysunku 4.
W celu połączenia składników base oraz platform tak, aby możliwy był obrót pomiędzy nimi, nadane zostaną więzy wyrównania osi obu elementów, a następnie połączenia obu płaszczyzn. Aby wyrównać osiowo powierzchnie walcowe należy wykorzystać polecenie Concentric i wskazać odpowiednie fragmenty powierzchni w pierwszym i drugim elemencie. Ponieważ komponent base został utwierdzony, to tylko platform ma możliwość zmiany położenia, w celu dopasowania się do narzucanych więzów. Stąd też warto zawsze ustawić pierwszy element jako nieruchomy. Po wyśrodkowaniu obu brył można połączyć ich współpracujące płaszczyzny za pomocą polecenia Coincident (Rys. 5).
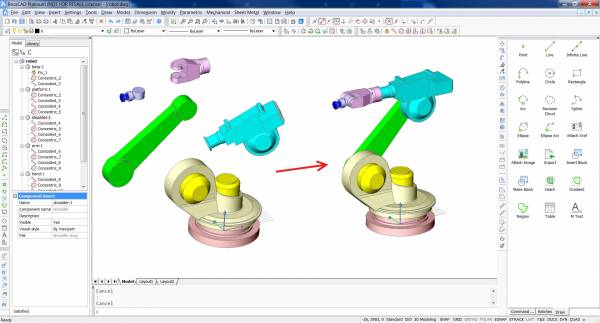
Wszystkie pozostałe komponenty są definiowane za pomocą tych dwóch więzów. Można oczywiście wstawić naraz więcej obiektów do obszaru roboczego, a dopiero później je składać, gdyż dla programów CAD nie ma znaczenia w jakiej kolejności będą te składniki dodawane. Najważniejsze są powiązania pomiędzy nimi, które definiują od razu możliwość wykonywania ruchów przez mechanizm. Gdyby w przypadku pierwszej pracy dodać jeszcze zablokowanie obrotu, lub w inny sposób uniemożliwić wykonanie takiego ruchu, nie byłoby możliwości analizy ruchliwości ramienia robota. Należy więc zawsze podczas składania mieć na uwadze, jakie relacje są wymagane, a których w żadnym przypadku być nie powinno.
Każde definiowane połączenie pomiędzy obiektami jest odwzorowywane na drzewie modelu i każdy komponent ma pokazane wykorzystywane przez niego więzy (Rys. 6).
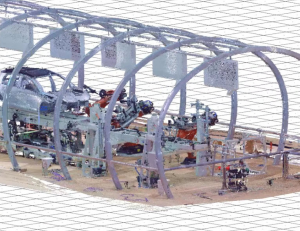
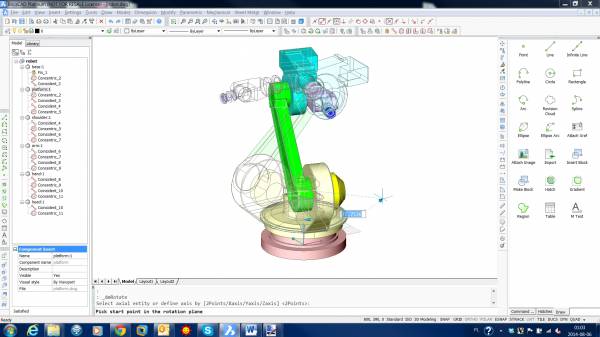
Tym sposobem mamy gotowe złożenie ramienia robota transportowego lub spawalniczego na linii technologicznej. W przypadku takiej konstrukcji bardzo ważną kwestią jest ruchliwość całego złożenia, toteż należy przeprowadzić analizę kinematyczną produktu. W BricsCAD najprostszą możliwością jest wybranie polecenia obrotu i – po wskazaniu komponentu, który ma się obracać – sprawdzenie jak dany mechanizm będzie funkcjonował (Rys. 7). Jest to oczywiście bardzo uproszczona wersja kontroli, gdyż przy takim sterowaniu, mamy wpływ jedynie na pojedynczą parę kinematyczną i nadawanie jej ruchu nie będzie wiązało się z ruchem całej konstrukcji.
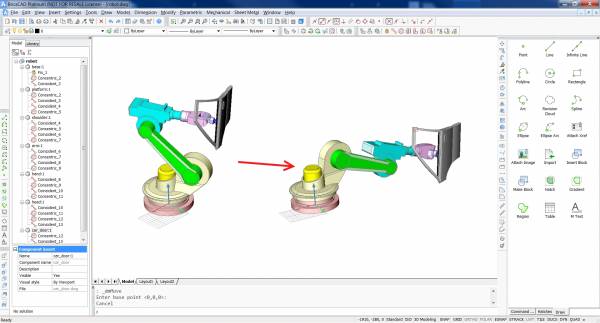
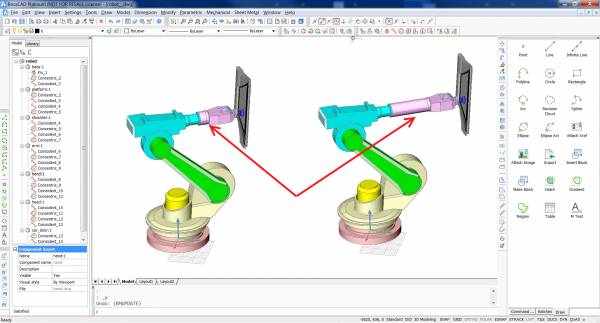
W tym przypadku można zasymulować prawdziwe zastosowanie robota i sprawdzić czy zasięg jego ramion jest odpowiedni i czy prawidłowo poruszają się jego komponenty. W tym celu, aby ułatwić przeprowadzenie analizy ruchliwości, można dodać nowy komponent złożenia, np. drzwi, które ramię robota może transportować z jednego stanowiska roboczego na drugie. Zamocowanie drzwi do uchwytu będzie symulować chwytak np. z pneumatyczną ssawką. Drzwi będą więc połączone z głowicą roboczą (head) zarówno poprzez przyleganie powierzchni, jak i współosiowość głowicy i otworu znajdującego się na listwie. Po utworzeniu więzów łączących ramię robota z drzwiami można przeprowadzić analizę. W tym celu można wybrać przenoszenie drzwi, a po ich zaznaczeniu i wybraniu punktu bazowego, dowolnie manipulować ich przemieszczaniem. Korzystając z tej metody można wyznaczyć np. graniczne miejsca, do których ramię może sięgnąć, lub sprawdzić czy zmieści się w określonej przestrzeni (Rys. 8).
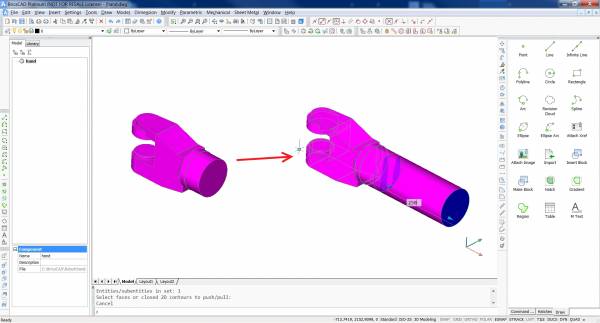
Jeśli okazałoby się że np. z powodu nie wystarczającego zasięgu pracy konieczne jest wydłużenie ramienia, można tę czynność wykonać bardzo prosto w kontekście całego złożenia. Aby przeprowadzić tę czynność na ramieniu (hand) można najechać kursorem na ten obiekt, a następnie wybrać Open z menu kontekstowego, po czym można edytować w nowym oknie wybrany składnik. W tym przypadku wystarczy zmienić długość walcowej części ramienia. Można zrobić to za pomocą Model -> Direct Modeling -> Push/Pull i wskazać jedynie lico do przesunięcia oraz jego wartość (Rys. 9).
Po zmianie geometrii wystarczy plik zapisać i zamknąć okno. Aby zaktualizować zmiany w otwartym złożeniu należy wybrać aktualizację struktury za pomocą polecenia Update z menu Mechanical i struktura zostanie zaktualizowana (Rys. 10)
Metoda ta pozwala więc na przeanalizowanie całego spektrum różnych ruchów konstrukcji, a w sytuacji gdy konieczne jest wprowadzenie modyfikacji, umożliwia przeprowadzenie jej w sposób łatwy i powiązany ze złożeniem bazowym.
Przedstawione w artykule polecenia nie są jedynymi, które służą do składania całych złożeń w programach CAD, jednak ze względu na swoją uniwersalność są najczęściej używane. Istnieje oczywiście możliwość definiowana ograniczeń wymiarowo, czy za pomocą geometrii. Dodatkowo w BricsCAD można również zbudować kompletne stanowisko pracy robota i sprawdzić jak wygląda jego przestrzeń pracy i czy da się ustawić kilka robotów tak, by nie kolidowały ze sobą.
Krystian Binarski

Solid Edge 2023 - nowości w tegorocznej odsłonie

Testujemy Lenovo ThinkPad P14s 2. Generacji
Stacja robocza Lenovo ThinkStation P620
NX CAD i skanowanie 3D – którą drogę wybrać?

Poznaj nowości w IRONCAD 2021
W jaki sposób SOLIDWORKS 2021 wspiera innowacje