Eureka
 Polski
Polski  Angielski
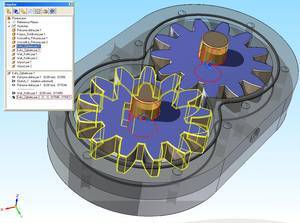
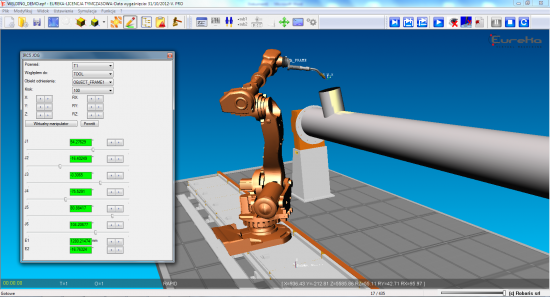
Angielski Eureka - system do wirtualnej obróbki należy do grupy systemów VolSim (od ang. Volumetric Simulation). Program pozwala, podobnie jak systemy z grupy KinSim (od ang. Kinamatic Simulation), na symulację względnych ruchów narzędzia i przedmiotu obrabianego, rozbudowaną dodatkowo o możliwość symulacji całej kinematyki maszyny i urządzeń wspomagających (podajników prętów, zmieniaczy palet, manipulatorów i nawet robotów). Niewątpliwą zaletą jest uniwersalność programu Eureka, który nie jest ograniczony rodzajem (frezarki, tokarki, szlifierki, frezarko-tokarki, roboty wieloosiowe) i konfiguracją maszyny NC (osie liniowe i obrotowe, konfiguracje wieloosiowych obrabiarek typu Head-Head, Table-Table, Head-Table czy roboty przemysłowe z torami jezdnymi lub stołami uchylno-obrotowymi i pozycjonerami).
Główne cechy systemu Eureka to:
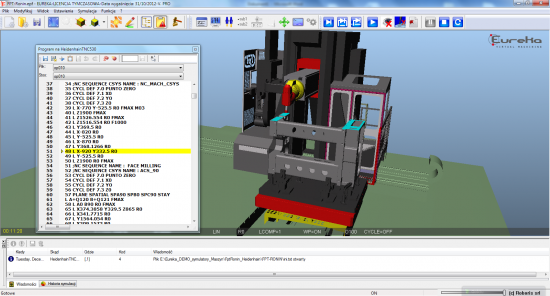
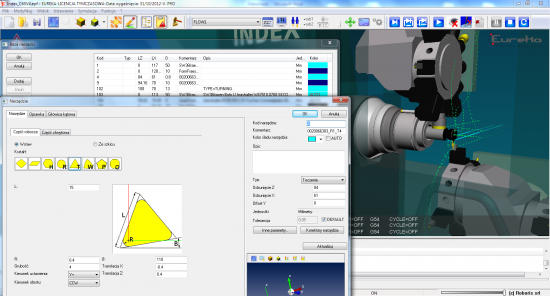
1) Symulacja pracy obrabiarek CNC
- weryfikacja kodu ISO (który jest uruchamiany na obrabiarce – a nie pliku pośredniego z systemu CAM, jak to jest w przypadku większości symulatorów maszyn)
- możliwość budowy dowolnego symulatora (dowolna liczba osi i ich wzajemne ustawienie)
- symulacja wymiany narzędzi, palet, przenoszenia i przesuwania materiału
- analiza resztek w postaci mapy odchyłek
- symulacja cykli pomiarowych i cykli wiertarskich oraz (na życzenie klienta) innych cykli stałych
- dowolne kształty i rodzaje narzędzi
- dokładne raportowanie przebiegu symulacji obróbki
2) Symulacja pracy robotów przemysłowych i programowanie off-line robotów
- gotowe do użycia postprocesory dla większości robotów przemysłowych (w tym MOTOMAN, ABB, KUKA, FANUC)
- obsługa osi zewnętrznych robota (tory jezdne, stoły obrotowe)
- doskonałe rozwiązanie dla aplikacji robotów spawalniczych, frezujących, malujących i szlifujących
 Komentarzy:
Skomentuj pierwszy
Komentarzy:
Skomentuj pierwszy

G-kod i M-kod w Obróbce CNC: Kluczowe elementy produkcji
Metody programowania obrabiarek CNC
NCSIMUL system do symulacji, weryfikacji i optymailizacji kodu C

Zrobotyzowany montaż szyb zespolonych - Przemysł 4.0

Frezowanie robotami CNC
Softshaper - oprogramowania do drukarek 3D


Polska Pasja do Kosmosu: Silesian Phoenix i Mars Rover na 3DEXPERIENCE World EDU 2025

Dassault Systèmes wprowadza 3D UNIV+RSES

SOLIDWORKS 2025 - kluczowe funkcje

Aktualizacja AutoCAD i AutoCAD LT 2025.1

Nowe polecenie w NX do zaokrąglania krzywych na powierzchni

Rzutowanie krzywej w SOLIDWORKS

BenQ SW242Q - profesjonalny 24 calowy monitor IPS 2K

Zmiany w licencjonowaniu produktów Autodesk