Wirtualna Nauka Robotów
Firma 3D MASTER wspólnie z Przemysłowym Instytutem Automatyki i Pomiarów (PIAP) oraz firmą VMT zaprasza na Pokaz na żywo Wirtualnej Nauki Robotów z wykorzystaniem trackera RevXpert.

Pokaz odbędzie się 30 października 2014 w Przemysłowym Instytucie Automatyki i Pomiarów w Warszawie.
Możliwości Wirtualnej Nauki Robotów zostaną zaprezentowane na przykładzie aplikacji spawalniczej, ale rozwiązanie to może mieć wiele zastosowań:
Metoda wirtualnego uczenia robotów (VRT) jest głownie wykorzystywana do szybkiego i intuicyjnego tworzenia kompleksowych ścieżek 3D narzędzia (freza, palnika, itp.) w różnych aplikacjach, takich jak spawanie, klejenie, malowanie, grawerowanie, lutowanie czy polerowanie.
Więcej o pokazie można znaleźć na stronie firmy 3D MASTER
Pokaz jest bezpłatny, jednak liczba miejsc ograniczona, dlatego zachęcamy do rejestracji na wydarzenie już dziś.
VRT – Wirtualne uczenie robotów (Virtual Robot Teach-in)
VMT oferuje nową metodę, uhonorowaną nagrodą ROBOTICS AWARDS, do innowacyjnego i intuicyjnego uczenia złożonych ścieżek robotów. W porównaniu z wykorzystywanymi obecnie procesami programowania za pomocą panelu operatora lub wskaźników, nowa metoda pozwala na uczenie robota za pomocą jednej ręki - łatwiej i szybciej. Z drugiej strony proces uczenia może być wykonywany bezpośrednio na rzeczywistym detalu nawet poza celą robota.
Główną zaletą niniejszej metody w porównaniu z programowaniem offline jest fakt, że model CAD przedmiotu nie jest potrzebny do stworzenia ścieżki. Niemniej jednak połączenie obu metod (VRT + programowanie offline) zmniejsza przestoje, więc wydajność robotów może być zwiększona.
Nowa metoda VRT jest:
• intuicyjna
• szybka
• łatwa
• dokładna
System VRT
• Zwiększa wydajność robota
• Redukuje czas programowania
• Uzupełnia programowanie offline
• Umożliwia dodatkowe rozwiązania jak pomiar celi robota lub docelowego TCP
Etapy wirtualnego uczenia
1. Generowanie ścieżki narzędzia
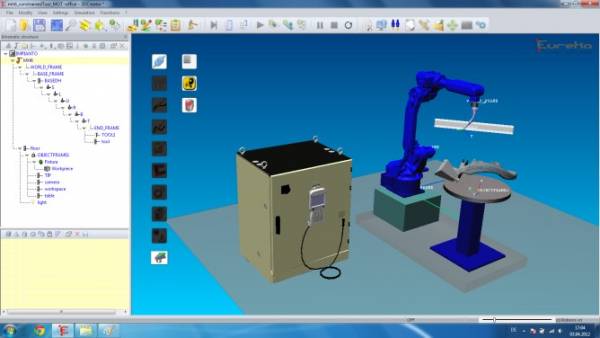
Wyrównanie robota i kamery przez wskazanie 3 punktów współrzędnych. Wskazywanie punktów na planowanej ścieżce robota i ruchy ruch wirtualnego robota na ekranie – sprawdzenie osiągalności (zakresów ruchów) i kolizji. Nagrywanie pozycji i wektorów ruchów z rzeczywistego detalu przez dotknięcie i wskazanie pojedynczych punktów lub tryb ciągły pracy wskaźnika.

2. Symulacja i optymalizacja
Przeprowadzanie symulacji całej ścieżki, która może być modyfikowana, zmieniana lub optymalizowana – w zależności od wymagań jak również parametrów procesu
3. Uruchomienie procesu
Wygenerowana ścieżka jest przetwarzana przez postprocesor i jest wysyłana bezpośrednio przez eternet lub pośrednio przez pendrive USB do układu sterowania robota w celu wykonania procesu – kompatybilność z różnymi rodzajami robotów.



Zapisywanie dokumentów SOLIDWORKS w postaci poprzednich wersji

Podsumowanie pierwszej oficjalnej konferencji KeyShot w Polsce

Przemysłowa Wiosna 2026 –targi dla przemysłu w sercu Polski

Targi Plastpol. Mocny filar branży w Europie Środkowo – Wschodniej

EZ-CAM – Intuicyjne oprogramowanie CAM

Czym jest PLM?

Wizualizacja danych sił RWIND w programie ParaView

Inżynierowie przyszłości - jak AI zmienia sposób projektowania i tworzenia