Kineo CAM - automatyczne wyszukiwanie ścieżki w modelach chmurowych 3D
Promation Engineering Ltd. jest wiodącym konstruktorem i producentem oprzyrządowania, automatyki i zrobotyzowanych systemów dla przemysłu motoryzacyjnego i nuklearnego. Promation Nuclear Division oferuje usługi dedykowane służące opracowaniu koncepcji, budowie prototypów, przeprowadzaniu testów i produkcji zaawansowanych zrobotyzowanych narzędzi dla przemysłu jądrowego na całym świecie.
„Korzystając z wiedzy firmy Promation na temat procesów skanowania laserowego wykorzystywanego w produkcji modeli 3D fabryk i zakładów, udało nam się udoskonalić naszą technologię oprogramowania do automatycznego znajdywania dróg dostępowych dla urządzeń i robotów mobilnych bezpośrednio z modelu chmurowego 3D Point Cloud istniejącej elektrowni. Technika ta toruje drogę do ogromnej oszczędności czasu i kosztów pod względem utrzymania, remontów i demontażu istniejących elektrowni.”, wyjaśnia Laurent Maniscalco, dyrektor generalny CAM Kineo.
Aby zrozumieć zakres tego osiągnięcia, musimy wiedzieć, że do tej pory, powykonawcza rekonstrukcja 3D modelu zakładu przemysłowego była długim i żmudnym procesem, szczególnie w wynajdowaniu bezkolizyjnych ścieżek demontażu:
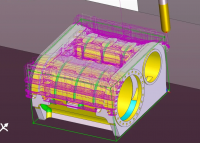
- W obrębie zakładu przemysłowego i sprzętu do pracy, skaner laserowy 3D używany jest do uzyskania modelu 3D Point Cloud.
- Model 3D Point Cloud jest całkowicie lub częściowo ręcznie przekształcany w powierzchniowy lub wieloboczny model 3D.
- Ścieżka robota mobilnego lub urządzenia przeznaczone do demontażu są definiowana ręcznie przez operatora w czasochłonnym procesie prób i błędów przy użyciu narzędzi sprawdzających interferencje.
- Potencjalnie ten sam krok, jak w punkcie 3, mający na celu przeprowadzenie operacji odwrotnej (demontaż – ponowne zamontowanie).
- Tworzenie dokumentów, animacji i filmów.
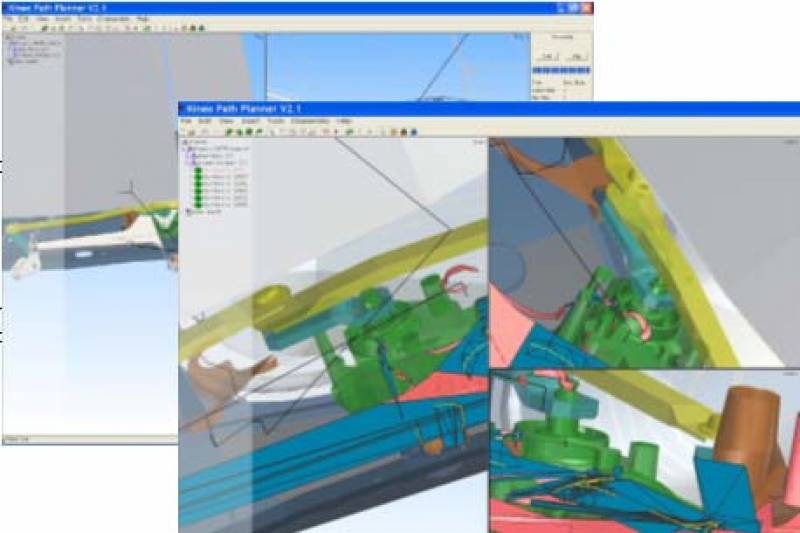
Oprogramowanie Kineo CAM po prostu eliminuje kroki od 2 do 4, dzięki czemu użytkownicy mogą znaleźć ścieżki bezpośrednio w Point Cloud. Sprawdzanie interferencji gwarantuje kontrolę kolizji, która przebiega dynamiczne i w czasie rzeczywistym, wykrywając szybko kolizje lub wyświetlając pomiary odległości pomiędzy obiektami 3D a modelami Point Cloud.
Co więcej, urządzenie do wyszukiwania bezkolizyjnych ścieżek jest automatyczne, użytkownik określa jedynie pozycje początku i celu z właściwym wzorem kinematycznym robota lub urządzenia i otrzymuje kilka zweryfikowanych dróg uwzględniających odległości do przeszkód.
Produkty programowe KCD dla Point CloudTM i KineoWorksTM są dostępne jako komponenty programowe służące łatwej integracji z aplikacjami innych firm, a także jako część autonomicznego rozwiązania KiteTM.
Na stronie producenta dostępny jest krótki film demonstrujący możliwości oprogramowania: planowanie ścieżki i wykrywanie kolizji w Point Cloud

G-kod i M-kod w Obróbce CNC: Kluczowe elementy produkcji
Metody programowania obrabiarek CNC
Nowe wydanie CAM EDGECAM 2023.1

Strategiczne partnerstwo między CAMdivision i MAIT

EDGECAM 2022.1 już jest

ZW3D 2023 – poznaj jego nowe funkcje


SOLIDWORKS 2025 - kluczowe funkcje

Aktualizacja AutoCAD i AutoCAD LT 2025.1

Nowe polecenie w NX do zaokrąglania krzywych na powierzchni

Rzutowanie krzywej w SOLIDWORKS

BenQ SW242Q - profesjonalny 24 calowy monitor IPS 2K

Zmiany w licencjonowaniu produktów Autodesk

Udoskonalone działanie grafiki w SOLIDWORKS

Dassault Systemes i Mistral AI zaczynają współpracę